سایبر یونی
ثبت نام
ورود
دروازه ای به آموزش نوین و مهارت های کاربردی
شبکههای اجتماعی سایبر یونی
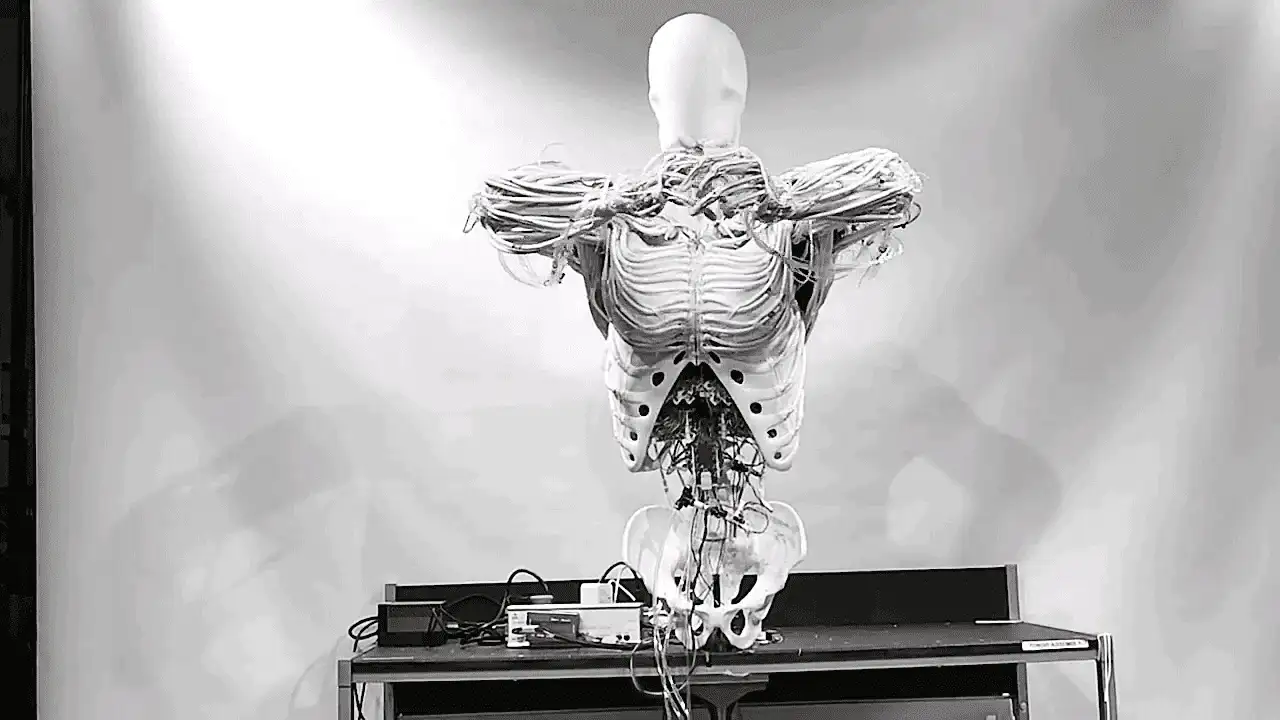
رباتهای عضلانی ۳۰ برابر سریعتر با الهام از تاندونهای طبیعی 🚀🤖
سایبر یونی
اشتراک گذاری:
پیشرفتهای اخیر در حوزهی رباتیک، به ویژه در زمینهی رباتهای نرم و عضلانی، نویدبخش تحولات عظیمی در آینده است. محققان با الهام از ساختار و عملکرد بینظیر سیستمهای بیولوژیکی، به دنبال طراحی رباتهایی هستند که قادر به انجام کارهایی با سرعت، دقت و کارایی بیشتر باشند. یکی از الهامبخشترین منابع در این زمینه، تاندونهای طبیعی هستند که نقش حیاتی در انتقال نیرو و حرکت در بدن انسان و حیوانات ایفا میکنند. این مقاله به بررسی چگونگی الهام گرفتن از تاندونهای طبیعی برای ساخت رباتهای عضلانی با عملکرد بهتر، به ویژه با افزایش سرعت ۳۰ برابری، میپردازد.
تاندونهای طبیعی: شاهکارهای مهندسی بیولوژیکی
تاندونها، بافتهای فیبری سخت و انعطافپذیری هستند که عضلات را به استخوانها متصل میکنند. آنها در انتقال نیروی تولید شده توسط انقباض عضلات به استخوانها نقش اساسی دارند، و این امر امکان حرکت را فراهم میکند. ویژگیهای منحصر به فرد تاندونها، آنها را به نمونههای ایدهآلی برای الهام گرفتن در طراحی رباتها تبدیل کرده است:
- انعطافپذیری بالا: تاندونها میتوانند بدون آسیب دیدن، تحت کشش و فشار زیادی قرار گیرند. این ویژگی به آنها اجازه میدهد تا حرکات مختلفی را تسهیل کنند.
- انتقال نیروی کارآمد: ساختار فیبری تاندونها به گونهای است که انتقال نیروی حاصل از انقباض عضلات را به حداکثر میرساند و هدررفت انرژی را به حداقل میرساند.
- توانایی ذخیره و رهاسازی انرژی: تاندونها میتوانند انرژی الاستیک را ذخیره کرده و در زمان مناسب آزاد کنند، که این امر به افزایش سرعت و قدرت حرکت کمک میکند (مانند پریدن).
مطالعهی دقیق ساختار و عملکرد تاندونها، اطلاعات ارزشمندی را در اختیار مهندسان رباتیک قرار داده است که میتوان از آنها برای بهبود عملکرد رباتهای عضلانی استفاده کرد.
رباتهای عضلانی: تقلید از طبیعت
رباتهای عضلانی، که به نام رباتهای نرم نیز شناخته میشوند، از مواد انعطافپذیر و نرم ساخته شدهاند که قابلیت تقلید از حرکات طبیعی عضلات را دارند. این رباتها معمولاً از سیستمهای محرک انعطافپذیری مانند هوا، مایعات یا مواد الکترواکتیو برای ایجاد حرکت استفاده میکنند. با الهام از تاندونهای طبیعی، محققان در تلاش هستند تا رباتهایی بسازند که:
- سرعت و قدرت بیشتری داشته باشند: با استفاده از مواد و طراحیهایی که قابلیت ذخیره و رهاسازی انرژی را دارند، میتوان سرعت و قدرت رباتها را افزایش داد.
- ایمنتر باشند: مواد نرم و انعطافپذیر رباتهای عضلانی، آنها را در مقایسه با رباتهای سخت و فلزی، برای تعامل با انسان و محیط پیرامون ایمنتر میکند.
- برای کاربردهای متنوعتر مناسب باشند: رباتهای عضلانی میتوانند در حوزههای مختلفی مانند پزشکی، مراقبتهای بهداشتی، و اکتشافات در محیطهای دشوار مورد استفاده قرار گیرند.
افزایش سرعت ۳۰ برابری: نوآوریهای کلیدی
یکی از بزرگترین چالشها در طراحی رباتهای عضلانی، افزایش سرعت عملکرد آنها است. محققان برای دستیابی به این هدف، از تکنیکهای مختلفی استفاده میکنند که بر الهام گرفتن از تاندونهای طبیعی تمرکز دارد. این تکنیکها عبارتند از:
- استفاده از مواد الاستیک پیشرفته: محققان در حال توسعهی موادی هستند که بتوانند انرژی را به طور کارآمدتری ذخیره و رها کنند. این مواد شامل پلیمرهای الاستیک و کامپوزیتهای فیبری میشوند که رفتار مکانیکی آنها شبیه به تاندونهای طبیعی است.
- طراحی ساختارهای تاندونی مصنوعی: مهندسان با استفاده از روشهای مختلفی مانند چاپ سهبعدی و مونتاژ فیبر، ساختارهای تاندونی مصنوعی را طراحی میکنند که میتوانند نیروی تولید شده توسط عضلات مصنوعی را به طور موثرتری منتقل کنند.
- بهینهسازی سیستمهای محرک: استفاده از سیستمهای محرک با پاسخ سریعتر و کارآمدتر، مانند محرکهای پنوماتیک یا هیدرولیک با طراحی پیشرفته، میتواند به افزایش سرعت رباتها کمک کند.
- ادغام حسگرها و کنترل هوشمند: سیستمهای کنترل هوشمند که قادر به تنظیم نیرو و حرکات ربات بر اساس اطلاعات حسگرها هستند، میتوانند به بهینهسازی عملکرد ربات و افزایش سرعت آن کمک کنند.
ترکیب این تکنیکها و الهام گرفتن از تاندونهای طبیعی، به محققان این امکان را داده است که رباتهای عضلانی را با سرعتهای خیرهکننده توسعه دهند. دستیابی به افزایش سرعت ۳۰ برابری، گواهی بر پیشرفتهای چشمگیر در این زمینه است.
مقایسهی عملکرد رباتهای عضلانی و رباتهای سنتی
برای درک بهتر پیشرفتهای حاصل شده در رباتهای عضلانی، مقایسهی عملکرد آنها با رباتهای سنتی ضروری است. جدول زیر، مقایسهای بین این دو نوع ربات را ارائه میدهد:
| ویژگی | رباتهای سنتی | رباتهای عضلانی (با الهام از تاندونها) |
|---|---|---|
| مواد ساخت | فلزات، پلاستیکهای سخت | مواد نرم و انعطافپذیر، کامپوزیتهای الاستیک |
| سیستم محرک | موتورهای الکتریکی، گیربکسها | سیستمهای پنوماتیک، هیدرولیک، مواد الکترواکتیو |
| انعطافپذیری | محدود | بالا |
| ایمنی | کمتر | بیشتر |
| سرعت | متوسط | بسیار بالا (با الهام از تاندونها) |
| کاربردها | صنعت، تولید، حمل و نقل | پزشکی، مراقبتهای بهداشتی، اکتشافات، تعامل با انسان |
کاربردهای بالقوه رباتهای عضلانی با عملکرد بهتر
رباتهای عضلانی با سرعت و قدرت بهبود یافته، کاربردهای بالقوه گستردهای در حوزههای مختلف دارند:
- پزشکی: جراحیهای دقیق، توانبخشی، ساخت اندامهای مصنوعی با حرکات طبیعیتر.
- مراقبتهای بهداشتی: کمک به افراد سالمند و معلول در انجام فعالیتهای روزمره، پرستاری از بیماران.
- صنعت: مونتاژ قطعات کوچک با دقت بالا، انجام کارهای خطرناک در محیطهای صنعتی.
- اکتشافات: کاوش در محیطهای دشوار و خطرناک مانند فضا، زیر آب، و مناطق آلوده.
- ورزش: بهبود عملکرد ورزشی، ساخت تجهیزات ورزشی هوشمند.
با پیشرفتهای مداوم در این زمینه، انتظار میرود که رباتهای عضلانی در آینده نقش مهمی در زندگی ما ایفا کنند.
نتیجهگیری
الهام گرفتن از تاندونهای طبیعی، یک رویکرد حیاتی برای توسعهی رباتهای عضلانی با عملکرد بهتر، به ویژه با افزایش سرعت است. با استفاده از مواد الاستیک پیشرفته، طراحی ساختارهای تاندونی مصنوعی، و بهینهسازی سیستمهای محرک، محققان توانستهاند رباتهایی بسازند که سرعت و قدرت بیشتری نسبت به رباتهای سنتی دارند. این پیشرفتها، نویدبخش تحولات بزرگی در حوزههای مختلف، از جمله پزشکی و صنعت، است. با ادامه تحقیقات و نوآوری، انتظار میرود که رباتهای عضلانی در آینده نقش فزایندهای در بهبود کیفیت زندگی ما ایفا کنند.
سوالات متداول (FAQ)
۱. تفاوت اصلی بین رباتهای عضلانی و رباتهای سنتی چیست؟
تفاوت اصلی در مواد ساخت و سیستم محرک است. رباتهای سنتی از مواد سخت و موتورهای الکتریکی استفاده میکنند، در حالی که رباتهای عضلانی از مواد نرم و سیستمهای محرک انعطافپذیر مانند هوا یا مایعات بهره میبرند. این امر باعث میشود رباتهای عضلانی انعطافپذیری بیشتری داشته باشند و برای تعامل با انسان ایمنتر باشند.
۲. چگونه تاندونهای طبیعی به افزایش سرعت رباتها کمک میکنند؟
تاندونها با ذخیره و رهاسازی انرژی الاستیک، به افزایش سرعت حرکات کمک میکنند. محققان با الهام گرفتن از این قابلیت تاندونها، در حال توسعهی موادی هستند که بتوانند انرژی را به طور مشابه ذخیره و رها کنند. همچنین، آنها با طراحی ساختارهای تاندونی مصنوعی، انتقال نیروی تولید شده توسط عضلات مصنوعی را بهینه میکنند.
۳. چه چالشهایی در توسعهی رباتهای عضلانی وجود دارد؟
چالشهای اصلی شامل توسعهی مواد با خواص مکانیکی مطلوب، طراحی سیستمهای محرک کارآمد و بهینهسازی کنترل رباتها است. همچنین، افزایش دقت و قابلیت اطمینان رباتهای عضلانی برای کاربردهای عملی، یک چالش مهم محسوب میشود.
نوشتن دیدگاه

ساخت ربات تلگرام: کلید طلایی اتوماسیون کسبوکار شما در عصر دیجیتال
ما در این مقاله جامع...
نویسنده: سایبر یونی
تاریخ انتشار: جمعه ۰۹ آبان ۱۴۰۴

روباتهای نجاتگر در ماموریتهای امداد و نجات: تحولی در عملیاتهای امدادی
این مقاله به بررسی تکنولوژیهای...
نویسنده: سایبر یونی
تاریخ انتشار: پنجشنبه ۰۳ آبان ۱۴۰۳

مک مینی کوچک شده و آیپد مینی جدید ممکن است در ماه نوامبر عرضه شوند!!
شایعه طراحی مجدد مک مینی...
نویسنده: سایبر یونی
تاریخ انتشار: سهشنبه ۱۷ مهر ۱۴۰۳
دیدگاه های شما
دیدگاهی وجود ندارد